



This version (23 Jan 2024 10:40) was approved by Adrian Costina.The Previously approved version (31 Aug 2022 11:18) is available.
Table of Contents
JESD204B/C Link Receive Peripheral
The Analog Devices JESD204B/C Link Receive Peripheral implements the link layer handling of a JESD204 receive logic device. Implements the 8B/10B based link layer defined in JESD204C standard that is similar to the link layer defined in JESD204B. This includes handling of the SYSREF and SYNC~ and controlling the link state machine accordingly as well as performing per lane descrambling and character replacement. Implements the 64B/66B based link layer defined in the JESD204C standard. This includes handling of the SYSREF, per lane decoding of sync header, descrambling, CRC checking of data blocks and error monitoring.
The type of link layer is selectable during implementation phase through the LINK_MODE synthesis parameter.
It has been designed for interoperability with Analog Devices JESD204 ADC converter products. To form a complete JESD204 receive logic device it has to be combined with a PHY layer and transport layer peripheral.
Features
- Backwards compatibility with JESD202B
- 64B/66B link layer defined in JESD204C
- Subclass 0 and Subclass 1 support
- Deterministic Latency (for Subclass 1 operation)
- Runtime re-configurability through memory-mapped register interface (AXI4-Lite)
- Interrupts for event notification
- Diagnostics
- Max Lanerate with 8B/10B mode: 15 Gbps
- Max Lanerate with 64B/66B mode: 32 Gbps
- Low Latency
- Independent per lane enable/disable
Utilization
Files
| Name | Description |
|---|---|
| axi_jesd204_rx.v | Verilog source for the peripheral. |
| axi_jesd204_rx_ip.tcl | TCL script to generate the Vivado IP-integrator project for the peripheral. |
Block Diagram

Synthesis Configuration Parameters
| Name | Description | Default |
|---|---|---|
ID | Instance identification number. | 0 |
NUM_LANES | Maximum number of lanes supported by the peripheral. | 1 |
NUM_LINKS | Maximum number of links supported by the peripheral. | 1 |
LINK_MODE | Decoder selection of the link layer. 1 - 8B/10B mode 2 - 64B/66B mode | 1 |
DATA_PATH_WIDTH | Data path width in bytes. Set it 4 in case of 8B/10B, 8 in case of 64B/66B | 4 |
TPL_DATA_PATH_WIDTH | Data path width in bytes towards transport layer. Must be greater or equal to DATA_PATH_WIDTH. Must be a power of 2 integer multiple of the F parameter. | 4 |
ASYNC_CLK | Set this parameter to 1 if the link clock and the device clocks have different frequencies, or if they have the same frequency but a different source. If set, synchronizing logic and a gearbox of ratio DATA_PATH_WIDTH:TPL_DATA_PATH_WIDTH is inserted to do the rate conversion. If not set, TPL_DATA_PATH_WIDTH must match DATA_PATH_WIDTH, the same clock must be connected to clk and device_clk inputs. | 0 |
Signal and Interface Pins
| Name | Type | Description |
|---|---|---|
s_axi_aclk | Clock | All S_AXI signals and irq are synchronous to this clock. |
s_axi_aresetn | Synchronous active low reset | Resets the internal state of the peripheral. |
S_AXI | AXI4-Lite bus slave | Memory mapped AXI-lite bus that provides access to modules register map. |
irq | Level-High Interrupt | Interrupt output of the module. Is asserted when at least one of the modules interrupt is pending and enabled. |
clk | Clock | Link clock for the JESD204 interface. Must be line clock / 40 for correct operation in 8B/10B mode, line clock / 66 in 64B/66B mode. |
reset | Reset | Reset active high synchronous with the Link clock. |
device_clk | Clock | Device clock for the JESD204 interface. Its frequency must be link clock * DATA_PATH_WIDTH / TPL_DATA_PATH_WIDTH |
device_reset | Reset | Reset active high synchronous with the Device clock. |
RX_DATA | AXI4-Streaming interface | Received data. |
sync[m-1:0] | Output | JESD204 SYNC~ (or SYNC_N) signals, available in 8B/10B mode. (0 <= m < NUM_LINKS) |
sysref | Input | JESD204 SYSREF signal. |
RX_PHYn | JESD204 receive PHY interface | n-th lane of the JESD204 interface (0 <= n < NUM_LANES). |
phy_en_char_align | Output | Enable transceiver character alignment. |
phy_ready | Input | Transceiver status. |
Register Map
JESD204 RX (axi_jesd204_rx)
| Access Type | Name | Description |
|---|---|---|
| RO | Read-only | Reads will return the current register value. Writes have no effect. |
| RW | Read-write | Reads will return the current register value. Writes will change the current register value. |
| RW1C | Write-1-to-clear | Reads will return the current register value. Writing the register will clear those bits of the register which were set to 1 in the value written. |
| V | Volatile | The V suffix indicates that the register is volatile and its content might change without software interaction. The value of a non-volatile register will not change without an explicit write done by software. |
Theory of Operation
The JESD204B/C receive peripheral consists of two main components. The register map and the link processor. Both components are fully asynchronous and are clocked by independent clocks. The register map is in the s_axi_aclk clock domain, while the link processor is in the clk and device_clk clock domain.
The register map is used to configure the operational parameters of the link processor as well as to query the current state of the link processor. The link processor itself is responsible for handling the JESD204 link layer protocol.
Interfaces and Signals
Register Map Configuration Interface
The register map configuration interface can be accessed through the AXI4-Lite S_AXI interface. The interface is synchronous to the s_axi_aclk. The s_axi_aresetn signal is used to reset the peripheral and should be asserted during system startup until the s_axi_aclk is active and stable. De-assertion of the reset signal should be synchronous to s_axi_aclk.
JESD204 Control Signals
The sync and sysref signals correspond to the SYNC~ and SYSREF signals of the JESD204 specification.
The sync signal is asserted by the peripheral during link initialization and must be connected to the corresponding JESD204 ADC converter devices on the same link.
The sysref signal is generated externally and is optional. It is only required to achieve deterministic latency in subclass 1 mode operation. If the sysref signal is not connected software needs to configure the peripheral accordingly to indicate this.
When the sysref signal is used, in order to ensure correct operation, it is important that setup and hold of the external signal relative to the device_clk signal are met. Otherwise, deterministic latency cannot be guaranteed.
Transceiver Interface (RX_PHYn)
For each lane, the peripheral has one corresponding RX_PHY interface. These interfaces accept the physical layer data from the downstream physical layer transceiver peripheral.
The physical layer is responsible for clock recovery, character alignment, de-serialization as well an 8b10b decoding.
User Data Interface (RX_DATA)
User data is provided on the AXI4-Stream RX_DATA interface. The interface is a reduced AXI4-Stream interface and only features the TVALID flow control signal, but not the TREADY flow control signal. The behavior of the interface is as if the TREADY signal was always asserted. This means as soon as rx_valid is asserted a continuous stream of user data must be accepted from rx_data.

After reset and during link initialization the rx_valid signal is de-asserted. As soon as the User Data Phase is entered the rx_valid will be asserted to indicate that the peripheral is now providing and the processed data at the rx_data signal. The rx_valid signal stays asserted until the link is either deactivated or re-initialized.

Typically the RX_DATA interface is connected to a JESD204 transport layer peripheral that de-frames the data and passes it to the application layer. The internal data path width of the peripheral is four, this means that four octets per lane are processed in parallel. When in the user data phase the peripheral provides four octets for each lane in each beat.
This means that RX_DATA interface is DATA_PATH_WIDTH * 8 * NUM_LANES bits wide. With each block of consecutive DATA_PATH_WIDTH * 8 bits corresponding to one lane. The lowest DATA_PATH_WIDTH * 8 bits correspond to the first lane, while the highest DATA_PATH_WIDTH * 8 bits correspond to the last lane.
E.g. for 8B/10B mode where DATA_PATH_WIDTH=4. Each lane specific 32-bit block corresponds to four octets each 8 bits wide. The temporal ordering of the octets is from LSB to MSB, this means the octet placed in the lowest 8 bits was received first, the octet placed in the highest 8 bits was received last.
Data corresponding to lanes that have been disabled should be ignored and their value is undefined.
Configuration Interface
The peripheral features a register map configuration interface that can be accessed through the AXI4-Lite S_AXI port. The register map can be used to configure the peripherals operational parameters, query the current status of the device and query the features supported by the device.
Peripheral Identification and HDL Synthesis Settings
The peripheral contains multiple registers that allow the identification of the peripheral as well as the discovery of features that were configured at HDL synthesis time. Apart from the SCRATCH register all registers in this section are read-only and write access to them will be ignored.
The VERSION (0x000) register contains the version of the peripheral. The version determines the register map layout and general features supported by the peripheral. The version number follows semantic versioning. Increments in the major number indicate backward incompatible changes, increments in the minor number indicate backward compatible changes, patch letter increments indicate bug fix.
The PERIPHERAL_ID (0x004) register contains the value of the ID HDL configuration parameter that was set during synthesis. Its primary function is to allow to distinguish between multiple instances of the peripheral in the same design.
The SCRATCH (0x008) register is a general purpose 32-bit register that can be set to an arbitrary values. Reading the register will yield the value previously written (The value will be cleared when the peripheral is reset). Its content does not affect the operation of the peripheral. It can be used by software to test whether the register map is accessible or store custom peripheral associated data.
The IDENTIFICATION (0x00c) register contains the value of “204R”. This value is unique to this type of peripheral and can be used to ensure that the peripheral exists at the expected location in the memory mapped IO register space.
The SYNTH_NUM_LANES (0x010) register contains the value of the NUM_LANES HDL configuration parameter that was set during synthesis. It corresponds to the maximum of lanes supported by the peripheral. Possible values are between 1 and 32.
The SYNTH_DATA_PATH_WIDTH (0x014) register contains the value of the internal data path width per lane in octets. This is how many octets are processed in parallel on each lane and affects the restrictions of possible values for certain runtime configuration registers. The value is encoded as the log2() of the data path width. Possible values are:
- 1: Internal data path width is 2
- 2: Internal data path width is 4
- 3: Internal data path width is 8
The SYNTH_ELASTIC_BUFFER_SIZE (0x040) register describes the maximum amount of octets that the elastic buffer can hold. This puts a limit on the maximum local-multi-frame-clock (LMFC) / local-multiblock-clock (LEMC) period (subclass 1) as well as the maximum skew between individual lanes (subclass 0). Both must be less than the elastic buffer size.
Interrupt Handling
Interrupt processing is handled by three closely related registers. All three registers follow the same layout, each bit in the register corresponds to one particular interrupt.
When an interrupt event occurs it is recorded in the IRQ_SOURCE (0x088) register. For a recorded interrupt event the corresponding bit is set to 1. If an interrupt event occurs while the bit is already set to 1 it will stay set to 1.
The IRQ_ENABLE (0x080) register controls how recorded interrupt events propagate. An interrupt is considered to be enabled if the corresponding bit in the IRQ_ENABLE register is set to 1, it is considered to be disabled if the bit is set to 0.
Disabling an interrupt will not prevent it from being recorded, but only its propagation. This means if an interrupt event was previously recorded while the interrupt was disabled and the interrupt is being enabled the interrupt event will then propagate.
An interrupt event that has been recorded and is enabled propagates to the IRQ_PENDING (0x084) register. The corresponding bit for such an interrupt will read as 1. Disabled or interrupts for which no events have been recorded will read as 0. Also if at least one interrupt has been recorded and is enabled the external irq signal will be asserted to signal the IRQ event to the upstream IRQ controller.
A recorded interrupt event can be cleared (or acknowledged) by writing a 1 to the corresponding bit to either the IRQ_SOURCE or IRQ_PENDING register. It is possible to clear multiple interrupt events at the same time by setting multiple bits in a single write operation.
For more details regarding interrupt operation see the interrupts section of this document.
Link Control
The LINK_DISABLE (0x0c0) register is used to control the link state and switch between enabled and disabled. While the link is disabled its state machine will remain in reset and it will not react to any external event like the SYSREFsignal.
Writing a 0 to the LINK_DISABLE register will enable the link. While the link state is changing from disabled to enabled it will go through a short initialization procedure, which will take a few clock cycles. To check whether the initialization procedure has completed and the link is fully operational the LINK_STATE (0x0c4) register can be checked. The LINK_STATE ([0]) bit will contain a 0 when the link is fully enabled and will contain a 1 while it is disabled or going through the initialization procedure.
Writing a 1 to the LINK_DISABLE register will immediately disable the link.
The EXTERNAL_RESET ([1]) bit in the LINK_STATE register indicates whether the external link reset signal is asserted (1) or de-asserted (0). When the external link reset is asserted the link is disabled regardless of the setting of LINK_DISABLE. The external link reset is controlled by the fabric and might be asserted if the link clock is not stable yet.
Multi-link Control
A multi-link is a link where multiple converter devices are connected to a single logic device (FPGA). All links involved in a multi-link are synchronous and established at the same time. For an 8B/10B RX link, this means that the SYNC~ signal needs to be propagated from the FPGA to each converter.
For an 8B/10B link the MULTI_LINK_DISABLE register allows activating or deactivating each SYNC~ lines independently. This is useful when depending on the use case profile some converter devices are supposed to be disabled.
Link Configuration
The link configuration registers control certain aspects of the runtime behavior of the peripheral. Since the JESD204 standard does now allow changes to link configuration while the link is active the link configuration registers can only be modified while the link is disabled. As soon as it is enabled the configuration registers turn read-only and any writes to them will be ignored.
The LANES_DISABLE (0x200) register allows to disable individual lanes. Each bit in the register corresponds to a particular lane and indicates whether that lane is enabled or disabled. Bit 0 corresponds to the first lane, bit 1 to the second lane and so on. A value of 0 for a specific bit means the corresponding lane is enabled, a value of 1 means the lane is disabled. A disabled lane will not receive any data when the link is otherwise active. By default, all lanes are enabled.
The LINK_CONF0 register configures the octets-per-frame and frames-per-multi-frame settings of the link. The OCTETS_PER_FRAME ([18:16]) field should be set to the number of octets-per-frame minus 1 (F - 1). The OCTETS_PER_MULTIFRAME ([7:0]) field should be set to the number of octets-per-frame multiplied by the number of frames-per-multi-frame minus 1 (FxK - 1). For correct operation FxK must be a multiple of 4. In 64B/66B mode this field matches and also represents the number of octets per extended multiblock (Ex32x8 - 1).
The LINK_CONF1 register allows disabling optional link level processing stages. The DESCRAMBLER_DISABLE ([0]) bit controls whether descrambling of the received user data is enabled or disabled. A value of 0 enables descrambling and a value of 1 disables it. In 64B/66B mode descrambling must be always enabled. The CHAR_REPLACEMENT_DISABLE ([1]) bit controls whether alignment character replacement is performed or not. A value of 0 enables character replacement and a value of 1 disables it. If character replacement is disabled and an alignment character is received (/F/ or /A/) a unexpected K-character error is raised.
Both the transmitter as well as receiver device on the JESD204 link need to be configured with the same settings for scrambling/descrambling and character replacement for correct operation.
Character replacement is used only in 8B/10B links and completely disregarded in 64B/66B mode.
The LINK_CONF2 register controls the behavior of elastic buffer. The BUFFER_EARLY_RELEASE ([16]) bit configures when the data is released from the elastic buffer to the RX_DATA port. If the bit is set to 0 the data will be released at the earliest configured release point after all lanes are ready. When the bit is set to 1 the data will be released as soon as all lanes are ready. The former gives deterministic latency and is required for subclass 1 operation, the later gives minimum latency.
The BUFFER_DELAY ([11:0]) field allows to configure the buffer release opportunity point relative to the local-multi frame-clock (LMFC)/ local-multiblock-clock (LEMC). A setting of 0 indicates that the release opportunity is aligned to the LMFC/LEMC edge. A setting of X indicates that it trails the LMFC/LEMC edge by X octets.

The BUFFER_DELAY field must be set to a multiple of 4. Writing a value that is not a multiple of 4 will be rounded down to the next multiple of 4. For correct operation, the BUFFER_DELAY field must also be set to a value smaller than the number of octets per multi-frame (FxK).
This mechanism can be used to reduce overall latency while still maintaining deterministic latency if the maximum link latency (overall valid PVT settings) is known.
SYSREF Handling
The external SYSREF signal is used to align the internal local multiframe clocks (LMFC)/ local-multiblock-clock (LEMC) between multiple devices on the same link.
The SYSREF_CONF (0x100) register allows to configure the behavior of the SYSREF capture circuitry. Setting the SYSREF_DISABLE ([0]) bit to 1 disables the SYSREF handling. All external SYSREF events are ignored and the LMFC/LEMC is generated internally. For Subclass 1 operation SYSREF handling should be enabled and for Subclass 0 operation it should be disabled.
The SYSREF_LMFC_OFFSET (0x104) register allows to modify the offset between the SYSREF rising edge and the rising edge of the LMFC/LEMC.
For optimal operation it is recommended that all device on a JESD204 link should be configured in a way so that the total offset between
The value of the SYSREF_LMFC_OFFSET register must be set to a value smaller than the configured number of octets-per-multiframe (OCTETS_PER_MULTIFRAME), otherwise undefined behavior might occur.
The SYSREF_STATUS (0x108) register allows to monitor the status of the SYSREF signals. SYSREF_DETECTED ([0]) bit indicates that the peripheral as observed a SYSREF event. The SYSREF_ALIGNMENT_ERROR ([1]) bit indicates that a SYSREF event has been observed which was unaligned, in regards to the LMFC/LEMC period, to a previously recorded SYSREF event.
All bits in the SYSREF_STATUS register are write-to-clear. All bits will also be cleared when the link is disabled.
Note that the SYSREF_STATUS register will not record any events if SYSREF operation is disabled or the JESD204 link is disabled.
Link Status
All link status registers are read-only. While the link is disabled some of the link status registers might contain bogus values. Their content should be ignored until the link is fully enabled.
The STATUS_STATE ([1:0]) field of the LINK_STATUS (0x280) register indicates the state of the 8B/10B link state machine or 64B/66B link state machine depending on the selected decoder.
Possible values for a 8B/10B link are:
- RESET (0x0): The link is currently disabled
- WAIT FOR PHY (0x1): The controller waits for the PHY level component to be ready
- CGS (0x2): The controller is waiting for one or more lanes to complete the CGS phase
- DATA (0x3): All lanes are in the data phase and the link is properly established
Possible values for a 64B/66B link are:
- RESET (0x0): The link is currently disabled
- WAIT BLOCK SYNC (0x1): The controller waits for all enabled lanes to reach sync header alignment.
- BLOCK SYNC (0x2): All enabled lanes from the PHY reached sync header alignment phase.
- DATA (0x3): All enabled lanes reached the multi-block synchronization phase, elastic buffer released the data and the link is properly established
The state of each individual lane can be queried from the lane status registers.
Lane Status
Each lane has a independent status register (LANEn_STATUS (0x300)) that indicates the current state of the lane.
8B/10B Link Lane Status Fields
The CGS_STATE ([1:0]) indicates the current state of the lane code group synchronization:
- INIT (0x0): Lane is not synchronized.
- CHECK (0x1): Lane is in the process of synchronizing, at least some /K/ synchronization characters have been observed.
- DATA (0x2): Lane is synchronized and ready to receive data.
The IFS_READY ([4]) bit indicates that initial frame synchronization has completed for the lane and the lane is receiving either ILAS data or user data.
The LANEn_LATENCY (0x304) register holds the duration in octets between when the SYNC~ signal was de-asserted and when the frame synchronization for this particular lane has completed. The LANEn_LATENCY register only holds valid data if the IFS_READY bit of the LANEn_STATUS register is set.
64B/66B Link Lane Status Fields
The EMB_STATE ([10:8]) indicates the current state of the Extended Multi-Block alignment state machine:
- EMB_INIT (3'b001): Wait for sync header alignment and for an end of extended multiblock (EoEMB) indicator.
- EMB_HUNT (3'b010): Keep track and monitor consecutive EoEMBs until a threshold is reached.
- EMB_LOCK (3'b100): Asserted by receiver to indicate that extended multiblock alignment has been achieved
8B/10B Link ILAS Configuration Data
If the JESD204 transmitter emits an initial lane alignment sequence (ILAS) the configuration data embedded in the second multi-frame of the ILA sequence is captured by the peripheral and stored in a set of four per-lane registers (LANEn_ILAS0, LANEn_ILAS1, LANEn_ILAS2 and LANEn_ILAS3). ILAS_READY ([5]) bit in the corresponding LANEn_STATUS register indicates whether the ILAS configuration data has been captured for a specific lane. The data in the LANEn_ILASx registers is only valid when that bit is asserted.
The received ILAS configuration data can be used to verify that the transmitter device is using the expected configuration and that the lane and device mapping is correct.
Clock Monitor
The LINK_CLK_FREQ (0x0c8) register allows to determine the clock rate of the link clock (clk) relative to the AXI interface clock (s_axi_aclk). This can be used to verify that the link clock is running at the expected rate.
The DEVICE_CLK_FREQ (0x0cc) register allows to determine the clock rate of the device clock (device_clk) relative to the AXI interface clock (s_axi_aclk). This can be used to verify that the device clock is running at the expected rate.
The number is represented as unsigned 16.16 format. Assuming a 100MHz processor clock this corresponds to a resolution of 1.523kHz per LSB. A raw value of 0 indicates that the link clock is currently not active.
Interrupts
The core does not generates interrupts.
8B/10B Link

8B/10B Link State Machine

The peripheral can be in one of four main operating phases: RESET, WAIT FOR PHY, CGS, or DATA. Upon reset the peripheral starts in the RESET phase. The WAIT FOR PHY and CGS phases are used during the initialization of the JESD204 link. The DATA phase is used during normal operation when user data is received across the JESD204 link.
RESET phase
The RESET phase is the default state entered during reset. While disabled the peripheral will stay in the RESET phase. When enabled the peripheral will transition from the RESET phase to the WAIT FOR PHY phase.
If at any point the peripheral is disabled it will automatically transition back to the RESET state.
Lanes that have been disabled in the register map configuration interface will behave as if the link was in the RESET state regardless of the actual state.
WAIT FOR PHY phase
During the WAIT FOR PHY phase the peripheral will wait for all PHY controllers for all enabled lanes to be ready for operation. Once this condition is satisfied the controlled will transition to the CGS phase.
CGS phase
During the CGS phase the peripheral will assert the external ~SYNC signal and expects the connected JESD204 transmitter to send /K/ characters.
Each lane will independently the incoming data stream for /K/ characters and adjust its state machine according to the received characters.
Once all enabled lanes have entered the DATA state the link state will transition from the CGS phase to the DATA phase.
DATA phase
The DATA phase is the main operating mode of the peripheral. In this phase it will transmit transport layer data at the RX_DATA port. When the peripheral enters the DATA phase the valid signal of the RX_DATA interface will be asserted to indicate that transport layer data is now available.
By default the data received on each lane will is descrambled. Descrambling can optionally be disabled via the register map configuration interface. Descrambling is enabled or disabled for all lanes equally.
Scrambling reduces data-dependent effects, which can affect both the analog performance of the data converter as well as the bit-error rate of JESD204 serial link, therefore it is highly recommended to enable scrambling for the link.
The peripheral also performs per-lane alignment character monitoring. When alignment character replacement is enabled the JESD204 transmitter replaces under certain predictable conditions (i.e. the receiver can recover the replaced character) the last octet in a frame or multi-frame. Replaced characters at the end of a frame, that is also the end of a multi-frame, are replaced by the /A/ character. Replaced characters at the end of a frame, that is not the end of a multi-frame, are replaced by the /F/ character. If a alignment character is received the peripheral checks that the it is in the expected position, either the end of a frame or the end of a multi-frame, and reports an error if a lane has become misaligned. This allows to detect alignment errors and allows the application to re-initialize the link.
Alignment character monitoring can optionally be disabled via the register map configuration interface. Alignment character monitoring is enabled or disabled for all lanes equally. If alignment character monitoring is disabled no errors are reported when a misaligned alignment character is received.
Data on the RX_DATA port corresponding to a disabled lanes are undefined and should be ignored.
8B/10B Multi-endpoint RX link establishment
In a multi-endpoint configuration one link receive peripheral connects to several endpoints/converter devices.
In such cases the link is established only when all enabled endpoints reach the DATA phase. For that all endpoints must pass through CGS and ILAS stages. Depending on the software implementation that controls the converter devices the endpoints can be enabled at different moments. The link receive peripheral will receive the CGS characters and do character alignment until for all enabled endpoints lanes succeeds that and signalize that through the de-assertion of SYNC~ signal.
In the below example we have a multi-point link of four endpoints (NUM_LINKS = 4):
 Note. The physical layer is not depicted on purpose. JTXn represents the link layer counterpart in the converter device/endpoint n
Note. The physical layer is not depicted on purpose. JTXn represents the link layer counterpart in the converter device/endpoint n
The steps of the link bring-up are presented below:
- 1 - Link receive peripheral is enabled, will assert its
SYNC~signal to indicate to the endpoints it is ready to receive and align to theCGScharacters. AllSYNC~signal to all enabled endpoints assert in the same time.
- 2,3,4,5 - JESD transmit block of DAC enabled, will start sending
CGScharacters until itsSYNC~pin is not pulled low. The timing depends on the software implementation that controls the DAC.
- 6 - In Subclass 1 (SC1)
SYSREFis captured andLMFCin the FPGA and converter device is adjusted.
- 7 - Once the
CGScharacters are received correctly on all enabled lanes, on the next Frame clock boundary in SC0 orLMFCboundary in SC1 theSYNC~is de-asserted. AllSYNC~signal to all enabled endpoints de-assert in the same time. In SC1 ifSYSREFis not captured the link receive peripheral will stay in CGS state and will keepSYNC~asserted.
- 8 - Once all enabled endpoints (not masked by
MULTI_LINK_DISABLE) observe the de-assert of theSYNC~signal, on the next Frame clock boundary for SC0 or the nextLMFCboundary for SC1, will start sending theILASsequence, then after typically 4LMFCperiods later the actualDATA.
64B/66B Link
The 64 bit wide datapath of the link layer is fairly simple, the data received from the PHY is sent through a mandatory descrambler block to an elastic buffer that serves as an aligner cross lanes. Each beat of the datapath contains a block of data of 8 octets.
For each lane the control path starts from the 2 bit sync header connected to the header decoder that tracks and monitors multiblock and extended multiblock markers from the stream, reconstructs the 32 bits sync word corresponding to every multiblock and extracts the received CRC from it. The CRC is calculated for every multiblock and is compared against the received CRC. The mismatches are recorded by the error monitor block.
Beside the CRC errors the error monitor records invalid end of multiblock, end of extended multiblock and invalid sync header errors. The source of every error can be masked from the corresponding bit of the LINK_CONF3 register.

64B/66B Link State Machine
The peripheral can be in one of four main operating phases: RESET, WAIT BS, BLOCK SYNC, or DATA. Upon reset the peripheral starts in the RESET phase. The WAIT BS and BLOCK SYNC phases are used during the initialization of the JESD204 link. The DATA phase is used during normal operation when user data is received across the JESD204 link.

RESET phase
The RESET phase is the default state entered during reset. While disabled the peripheral will stay in the RESET phase. When enabled the peripheral will transition from the RESET phase to the WAIT FOR PHY phase.
If at any point the peripheral is disabled it will automatically transition back to the RESET state.
WAIT BS phase
During the WAIT BS phase the peripheral will wait for all PHY controllers for all enabled lanes to reach sync header alignment state ensuring the sync header stream separation from the data blocks. Once this condition is satisfied the controlled will transition to the BLOCK SYNC phase.
If one of the enabled lanes loses the the sync header alignment the link will fall back to WAIT BS state.
BLOCK SYNC phase
The BLOCK SYNC state ensures all enabled lanes achieved sync header alignment or block synchronization phase in other terms. During this state the peripheral will wait for all enabled lanes to reach extended multiblock alignment and the elastic buffer get released. Once each enabled lane is extended multiblock aligned for each lane the data blocks are stored in the elastic buffer then are released at a well defined moment relative to the SYSREF signal.
DATA phase
The DATA phase is the main operating mode of the peripheral. In this phase it will transmit transport layer data at the RX_DATA port. When the peripheral enters the DATA phase the valid signal of the RX_DATA interface will be asserted to indicate that transport layer data is now available.
64B/66B Link Extended MultiBlock Alignment State Machine
For each lane a state machine is used to detect the boundary of the extended multiblocks by tracking well defined markers in the sync header stream. Once the boundary is detected for each lane the corresponding data stream can be aligned across all enabled lanes. This is done through the elastic buffer.

EMB INIT State
The EMB INIT is the default state of the state machine, all disabled lanes stay in this state. The state is left only when the lane is enabled, the PHY controller of the corresponding lane is sync header aligned and a valid end of extended multiblock marker is detected in the sync header stream.
At any moment the PHY loses sync header alignment the state machine will fall back to the EMB INIT state.
EMB HUNT State
In the EMB HUNT state the state machine will look after four consecutive correct extended multiblock indicators, once this is achieved the state machine enters the EMB LOCK state. In case invalid end of multiblock or end of extended multiblock markers are detected the state machine falls back to the EMB INIT state.
EMB LOCK State
In the EMB LOCK state the monitoring of multiblock and extended multiblock indicators is continued. In case of eight consecutive indicators are incorrect the state machine will return in the EMB INIT state. This state ensures the validity of the 32 bit sync words constructed from the sync header stream. For each multiblock the calculated CRC of the previous multiblock is extracted from the current sync word.
Dual clock operation
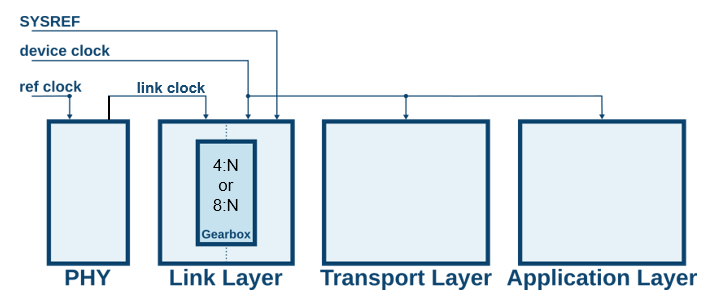
In case ASYNC_CLK parameter is set, a gearbox with 4:N (204B) or 8:N (204C) ratio is enabled in the link layer peripherals, where N depends on the F parameter of the link.
The goal of the gearbox is to have at the transport layer interface a data width that contains an integer number of frames per every device clock cycle (each beat) so an integer number of samples can be delivered/consumed to/from the application layer aligned to SYSREF ensuring deterministic latency in modes where N'=12 or F!=1,2,4.
The gearbox ratio corresponds with the ratio of the link layer interface data width towards physical layer and transport layer in octets. The interface width towards the physical layer in 8B/10B (204B) mode depends on the DATA_PATH_WIDTH synthesis parameter, and can be either 4 octets (default) or 8 octets. In 204B mode the util_adxcvr supports only data width of 4 octets. In 64b66b (aka 204C) mode the data width towards the physical interface is always 8 octets.
The data path width towards the transport layer is defined by the TPL_DATA_PATH_WIDTH synthesis parameter.
The following rules apply:
- TPL_DATA_PATH_WIDTH > = DATA_PATH_WIDTH
- TPL_DATA_PATH_WIDTH = m x F; where m is a positive integer, power of 2
The link clock and device clock ratio should be the inverse of the DATA_PATH_WIDTH : TPL_DATA_PATH_WIDTH ratio.
In this context the link clock will be lane rate/40 or lane rate/80 for 204B depending on DATA_PATH_WIDTH and lane rate / 66 for 204C 64B/66B, however the device clock could vary based in the F parameter.
64b/66b Link latency reduction
Deterministic latency can be reduced by adjusting the release point of the elastic buffer in RX link layer.
By default the release point of the elastic buffer is at the edge of LEMC.
In case of 64b66b link the LATENCY register will indicate how many octets will the elastic buffer store before the default release point for that specific lane. The release point can be adjusted to bring it closer to the last arrival lane (that will have the least octets in the buffer) so minimizing the buffer usage and the latency in turn. The LATENCY must be measured over multiple power-ups and bring-up sequence. Identify the slowest arrival lane (min value of the register). If multiple parallel links must be synchronized all lanes from all links must be included in the process.
Once the slowest lane delay is identified, before enabling the links, SW needs to set the register BUFFER_DEALY (0x240) from all parallel Rx links if exists based on the following formula:
Where:
- Buffer Delay - register 0x240 of the core
- F*K - is the size of a multiframe in octets
- ‘latency regs’ - is the measured latency of each lane observed during consecutive link bring-ups measured for all Rx links, see regs (0x304 + n*0x20) where n = 0..L-1 ; L is number of lanes
- TPLDW - TPL datapath width in octets. Can be read from the
SYNTH_DATA_PATH_WIDTH(0x14) regTPL_DATA_PATH_WIDTHfield.
This value it the absolute minimum. It is recommended to increase it slightly to have a better margin against power-up to power-up latency variations.
Software Support
To ensure correct operation it is highly recommended to use the Analog Devices provided JESD204 software packages for interfacing the peripheral. Analog Devices is not able to provide support in case issues arise from using custom low-level software for interfacing the peripheral.
Restrictions
During the design of the peripheral the deliberate decision was made to support only a subset of the features mandated by the JESD204 standard for receiver logic devices. The reasoning here is that the peripheral has been designed to interface to Analog Devices JESD204 ADC converter devices and features that are either not required or not supported by those converter devices would otherwise lie dormant in peripheral and never be used. Instead the decision was made to not implement those unneeded features even when the JESD204 standard requires them for general purpose JESD204 receiver logic devices. As Analog Devices ADC converter devices with new requirements are released the peripheral will be adjusted accordingly.
This approach allows for a leaner design using less resources, allowing for lower pipeline latency and a higher maximum device clock frequency.
The following lists where the peripheral deviates from the standard:
- No subclass 2 support. JESD204 subclass 2 has due to its implementation details restricted applicability and is seldom a viable option for a modern high-speed data converter system. To achieve deterministic latency it is recommend to use subclass 1 mode.
- Reduced number of octets-per-frame settings. The JESD204 standard allows for any value between 1 and 256 to be used for the number of octets-per-frame.
- The following octets-per-frame are supported by the peripheral: 1, 2, 4 and 8. (No longer applies starting from 1.07.a)
- Reduced number of frames-per-multi-frame settings. The following values are supported by the peripheral: 1-32, with the additional requirement that F*K is a multiple of 4. In addition F*K needs to be in the range of 4-256.
- Alignment character replacement when scrambling is disabled supported starting from 1.07.a
Additional Information
Supported Devices
JESD204B Analog-to-Digital Converters
- AD6673: 80 MHz Bandwidth, Dual IF Receiver
- AD6674: 385 MHz BW IF Diversity Receiver
- AD6676: Wideband IF Receiver Subsystem
- AD6677: 80 MHz Bandwidth, IF Receiver
- AD6684: 135 MHz Quad IF Receiver
- AD6688: RF Diversity and 1.2GHz BW Observation Receiver
- AD9208: 14-Bit, 3GSPS, JESD204B, Dual Analog-to-Digital Converter
- AD9234: 12-Bit, 1 GSPS/500 MSPS JESD204B, Dual Analog-to-Digital Converter
- AD9250: 14-Bit, 170 MSPS/250 MSPS, JESD204B, Dual Analog-to-Digital Converter
- AD9625: 12-Bit, 2.6 GSPS/2.5 GSPS/2.0 GSPS, 1.3 V/2.5 V Analog-to-Digital Converter
- AD9656: Quad, 16-Bit, 125 MSPS JESD204B 1.8 V Analog-to-Digital Converter
- AD9680: 14-Bit, 1.25 GSPS/1 GSPS/820 MSPS/500 MSPS JESD204B, Dual Analog-to-Digital Converter
- AD9683: 14-Bit, 170 MSPS/250 MSPS, JESD204B, Analog-to-Digital Converter
- AD9690: 14-Bit, 500 MSPS / 1 GSPS JESD204B, Analog-to-Digital Converter
- AD9691: 14-Bit, 1.25 GSPS JESD204B, Dual Analog-to-Digital Converter
- AD9694: 14-Bit, 500 MSPS JESD204B, Quad Analog-to-Digital Converter
- AD9083: 16-Channel, 125 MHz Bandwidth, JESD204B Analog-to-Digital Converter
JESD204B RF Transceivers
- AD9371: SDR Integrated, Dual RF Transceiver with Observation Path
- AD9375: SDR Integrated, Dual RF Transceiver with Observation Path and DPD
- ADRV9009: SDR Integrated, Dual RF Transceiver with Observation Path
- ADRV9008-1: SDR Integrated, Dual RF Receiver
- ADRV9008-2: SDR Integrated, Dual RF Transmitter with Observation Path
JESD204B/C Mixed-Signal Front Ends
Technical Support
Analog Devices will provide limited online support for anyone using the core with Analog Devices components (ADC, DAC, Clock, etc) via the EngineerZone under the GPL license. If you would like deterministic support when using this core with an ADI component, please investigate a commercial license. Using a non-ADI JESD204 device with this core is possible under the GPL, but Analog Devices will not help with issues you may encounter.
More Information
Navigation - HDL User Guide
resources/fpga/peripherals/jesd204/axi_jesd204_rx.txt · Last modified: 23 Jan 2024 10:40 by Adrian Costina