



This version (11 Feb 2021 18:03) was approved by Ioana Chelaru.The Previously approved version (10 Jul 2018 20:45) is available.
Table of Contents
ADIS1644X EVALUATION ON THE EVAL-ADIS
OVERVIEW
The ADIS16445 and ADIS16448 are low-profile, high-peformance IMUs that use a serial peripheral interface (SPI) for data communications. This interface enables direct connection with a large variety of embedded processor products. This electrical connection typically only requires 5 I/O lines for sychronous data collection, as show in the following figure:

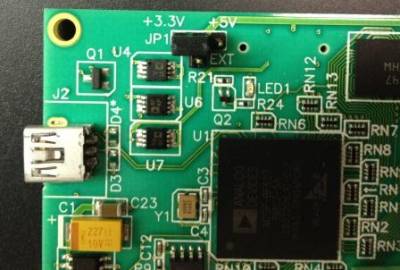
ADIS1644X/FLEX BREAKOUT BOARD
The ADIS1644X/FLEX provides a direct connection path between any of the ADIS1644x models and J4 on the EVAL-ADIS evaluation system. This accessory used to be part of the ADIS16334/PCBZ, ADIS16445/PCBZ and ADIS16448/PCBZ kits, but is now available for purchase as a separate accessory.
EVAL-ADIS: PC EVALUATION
For those who would prefer to perform PC-based evaluation of the ADIS16445 or ADIS16448, before developing their own embedded system, the EVAL-ADIS is the appropriate system to use. The remainder of this Wiki site will focus on PC-based evaluation with the EVAL-ADIS system.
EQUIPMENT LIST
SYSTEM REQUIREMENTS
Windows XP, Vista, 7
.NET Framework 3.5
NOTE: Newer versions of the .NET framework do not currnently support the IMU Evaluation software pacakge.
PHYSICAL SETUP
The ADIS16448/PCBZ includes one interface PCB, one flexible cable/connector and one ADIS16448AMLZ unit. The ADIS16445/PCBZ includes one interface PCB, one flexible cable/connector and one ADIS16445AMLZ unit. All setup instructions in this section apply to both ADIS16445 and ADIS16448 products. Note that the ADIS16445AMLZ does not have the 10-32/Tapped hole in its side wall. This will be the only observable difference in comparision with the ADIS16448AMLZ, which is the product that most of the pictures in this section represents. Use the flexible cable/connector to install the ADIS16448 onto the EVAL-ADIS, using the following five steps. Set interface PCB aside, as it is not used for connecting the ADIS16448AMLZ to the EVAL-ADIS.
NOTE: Do not plug the EVAL-ADIS into the USB cable at this stage of the setup. Wait until the software installation is complete.
NOTE: The machine screws that come with the EVAL-ADIS can have a moderate impact on local magnetic fields. For those who need the best performance out of the magnetometer solution, consider replacing them with machine screws that are made out of aluminum or other non-ferrous materials.
NOTE: The following steps represent the most convenient means of attachment, but do not support the “best practices” that are listed in this application note:
Step #1
Install the flexible cable onto the ADIS16448AMLZ. The following pictures provide a visual refernece for correct connection.
CORRECT CONNECTION



WARNING: Make sure that the connector is in proper alignment before pressing it in. Misalignment can cause pin damage and exposure to harmful conditions. The following pictures provide visual examples of INCORRECT PIN ALIGNMENT. The most common alignment issues will cause the top view to look different than the third picture, shown directly above this paragraph.
INCORRECT CONNECTION EXAMPLES


Step #2
Connect the other end of the flexible cable to the EVAL-ADIS, using J4, pins 1-20. J4 has 24 pins, so make sure that the flexible cable connects only to pins 1-20 on J4.



Step #3
Slide the ADIS16448AMLZ body towards J4, while tucking the excess flexing under the connector interface, as show in the following pictures.


Step #4
Secure the ADIS16448AMLZ body, using (4) M2x0.4x10mm machine screws (included with EVAL-ADIS) and the “E” mounting holes (EVAL-ADIS labels for mounting holes).


Step #5
Set JP1 (EVAL-ADIS) to “+3.3V.”
IMU EVALUATION SOFTWARE OVERVIEW
The EVAL-ADIS2 has been superseded by the EVAL-ADIS-FX3 and is no longer supported.
This guide assumes that you've connected your vibration sensor to the EVAL-ADIS2, drivers were successfully installed on your PC, and you've downloaded the correct software for your sensor. We recommend reviewing the Hardware User Guide before continuing.
Software Downloads
Click here to download the latest version of the IMU Evaluation software.
Click here to download the latest drivers for the EVAL-ADIS2.
This application requires Microsoft .NET 3.5 to be installed and enabled on the host PCs running Windows 10. Additional information on enabling .NET 3.5 can be found here.
EVAL-ADIS2 IMU Evaluation Software Overview
The IMU Evaluation Software is a Microsoft Windows (.NET) application that works in conjunction with the EVAL-ADIS2, in order to provide users with a PC-Based interface to most ADIS16xxx products. This platform enables observation of basic sensor functions, read/write access to all user-accessible registers, and full-rate data acquisition, which is synchronous with data production of each ADIS16xxx.

This guide builds upon the EVAL-ADIS2 Hardware User Guide and assumes that you've installed the necessary drivers and software.
Using the EVAL-ADIS2 IMU Evaluation Software
Main Window
Once the IMU Evaluation software loads, you should be presented with a window similar to the image shown below.

The image below has been color-coded to illustrate the different parts of the IMU Evaluation Software. These colored sections will be referred to in the following sections.

The drop-down menus highlighted in orange list additional features and utilities that make up the core functionality of the evaluation software.
- The Devices menu provides a list of supported products. Selecting a product from this list will configure the IMU evaluation software register map. Each device has a unique register map that must be selected to ensure proper sensor operation. The green box shows the active device. In this example, the ADIS16448 is selected.
- The Register Access option calls a sub-menu that lists all user-configurable registers available from the part number selected in the “Devices” drop-down menu. It also provides read/write access to each register.
- The Data Capture option calls a sub-menu designed to enable synchronous data logging from the selected device.
- The Demos option calls a 3-D visualization tool. This feature is only supported for the ADIS16480 and ADIS16448 devices.
- The Tools option calls a sub-menu that displays USB diagnostic information.
- The About option provides more detailed software revision information.
The purple box shows the primary, inertial output registers for the selected device. These values are updated in real-time after pressing the Read button (identified by a red box).
The yellow box shows three waveform recorder windows. Each window allows for plotting the three primary sensor types (gyroscopes, accelerometers, and magnetometers [if supported]). The top subplot displays gyroscope data, the middle plot displays accelerometer data and the bottom plot displays magnetometer data. Each plot color corresponds to the colors displayed in the “Output Registers” window (highlighted in purple).
Register Access
The Register Access window provides read and write access to all user-accessible registers listed in the selected device's datasheet. The image below shows a screenshot of the window.

The color-coded image below is referenced in the following section.

The purple box sorts each set of registers into a standard category. The available categories are:
- Control/Status - General sensor configuration, alarm, and metadata registers
- Output - Inertial sensor output registers
- Calibration - User offset and misc. calibration registers
The calibration register section mentioned above is separate from the factory calibration registers and procedures!
The section highlighted by the red box lists all of the registers in the selected category. Click on the register name to select a register for individual read/write access.
The green box identifies the read/write control options for the current register selection.
Registers must be written in hexadecimal format!
The Update Registers in Category button (shown in an orange box above) automatically reads all of the registers shown in the selected category (red box) and updates their contents in the GUI.
The section highlighted in yellow identifies provides a means of easily calling subroutines within the connected sensor. Clicking on a button is equivalent to writing a single-bit command to the respective register.
The Save Reg Settings to File programmatically reads and saves the contents of all of the registers in the current category into a *.csv (common-delimited) file. The Load Reg Settings from File button reads a target .csv file and attempts to write the saved values back into the sensor.
The Register Access form always writes to both the upper and lower bytes of a given register. When writing to a register, make sure to include the desired 16-bit value in hexadecimal format before clicking the Write Register button.
Data Capture
The Data Capture window only supports synchronous data acquisition and logging to a file on the host PC. Data samples are only read from the sensor when the data ready pin toggles, indicating that data is valid.

The color-coded image below is referenced in the following section.

The section highlighted in red lists all of the registers that are eligible for data capture. Checking the box next to each register indicates that the specified register values should be recorded once the data stream begins.
The section highlighted in green allows for customizing the file name and location of the resultant .csv files.
The section highlighted in yellow identifies the data stream configuration options.
- Record Length - The total number of samples to be captured. A sample is defined as a single “data valid” period as signaled by the data ready pin on the sensor
- Sample Rate - The instantaneous data ready rate as measured by the evaluation board
- Capture Time - The estimated data capture time in DD:HH:MM:SS format calculated based upon the instantaneous sample rate
- Add File Header - Selects whether a header displaying the contents of each column should be appended to the beginning of the .csv file
- Use Scaled Data - Signals to the software to convert the 16-bit values read from the sensor into a sign-adjusted (two's complement) scaled number. For example, when this option is enabled, be in units of degrees/second
Software Revision History
USB Driver Installation
The EVAL-ADIS2 has been superseded by the EVAL-ADIS-FX3 and is no longer supported.
This guide assumes that you've connected your vibration sensor to the EVAL-ADIS2, drivers were successfully installed on your PC, and you've downloaded the correct software for your sensor. We recommend reviewing the Hardware User Guide before continuing.
Software Downloads
Click here to download the latest version of the IMU Evaluation software.
Click here to download the latest drivers for the EVAL-ADIS2.
This application requires Microsoft .NET 3.5 to be installed and enabled on the host PCs running Windows 10. Additional information on enabling .NET 3.5 can be found here.
EVAL-ADIS2 IMU Evaluation Software Overview
The IMU Evaluation Software is a Microsoft Windows (.NET) application that works in conjunction with the EVAL-ADIS2, in order to provide users with a PC-Based interface to most ADIS16xxx products. This platform enables observation of basic sensor functions, read/write access to all user-accessible registers, and full-rate data acquisition, which is synchronous with data production of each ADIS16xxx.
This guide builds upon the EVAL-ADIS2 Hardware User Guide and assumes that you've installed the necessary drivers and software.
Using the EVAL-ADIS2 IMU Evaluation Software
Main Window
Once the IMU Evaluation software loads, you should be presented with a window similar to the image shown below.
The image below has been color-coded to illustrate the different parts of the IMU Evaluation Software. These colored sections will be referred to in the following sections.
The drop-down menus highlighted in orange list additional features and utilities that make up the core functionality of the evaluation software.
- The Devices menu provides a list of supported products. Selecting a product from this list will configure the IMU evaluation software register map. Each device has a unique register map that must be selected to ensure proper sensor operation. The green box shows the active device. In this example, the ADIS16448 is selected.
- The Register Access option calls a sub-menu that lists all user-configurable registers available from the part number selected in the “Devices” drop-down menu. It also provides read/write access to each register.
- The Data Capture option calls a sub-menu designed to enable synchronous data logging from the selected device.
- The Demos option calls a 3-D visualization tool. This feature is only supported for the ADIS16480 and ADIS16448 devices.
- The Tools option calls a sub-menu that displays USB diagnostic information.
- The About option provides more detailed software revision information.
The purple box shows the primary, inertial output registers for the selected device. These values are updated in real-time after pressing the Read button (identified by a red box).
The yellow box shows three waveform recorder windows. Each window allows for plotting the three primary sensor types (gyroscopes, accelerometers, and magnetometers [if supported]). The top subplot displays gyroscope data, the middle plot displays accelerometer data and the bottom plot displays magnetometer data. Each plot color corresponds to the colors displayed in the “Output Registers” window (highlighted in purple).
Register Access
The Register Access window provides read and write access to all user-accessible registers listed in the selected device's datasheet. The image below shows a screenshot of the window.
The color-coded image below is referenced in the following section.
The purple box sorts each set of registers into a standard category. The available categories are:
- Control/Status - General sensor configuration, alarm, and metadata registers
- Output - Inertial sensor output registers
- Calibration - User offset and misc. calibration registers
The calibration register section mentioned above is separate from the factory calibration registers and procedures!
The section highlighted by the red box lists all of the registers in the selected category. Click on the register name to select a register for individual read/write access.
The green box identifies the read/write control options for the current register selection.
Registers must be written in hexadecimal format!
The Update Registers in Category button (shown in an orange box above) automatically reads all of the registers shown in the selected category (red box) and updates their contents in the GUI.
The section highlighted in yellow identifies provides a means of easily calling subroutines within the connected sensor. Clicking on a button is equivalent to writing a single-bit command to the respective register.
The Save Reg Settings to File programmatically reads and saves the contents of all of the registers in the current category into a *.csv (common-delimited) file. The Load Reg Settings from File button reads a target .csv file and attempts to write the saved values back into the sensor.
The Register Access form always writes to both the upper and lower bytes of a given register. When writing to a register, make sure to include the desired 16-bit value in hexadecimal format before clicking the Write Register button.
Data Capture
The Data Capture window only supports synchronous data acquisition and logging to a file on the host PC. Data samples are only read from the sensor when the data ready pin toggles, indicating that data is valid.
The color-coded image below is referenced in the following section.
The section highlighted in red lists all of the registers that are eligible for data capture. Checking the box next to each register indicates that the specified register values should be recorded once the data stream begins.
The section highlighted in green allows for customizing the file name and location of the resultant .csv files.
The section highlighted in yellow identifies the data stream configuration options.
- Record Length - The total number of samples to be captured. A sample is defined as a single “data valid” period as signaled by the data ready pin on the sensor
- Sample Rate - The instantaneous data ready rate as measured by the evaluation board
- Capture Time - The estimated data capture time in DD:HH:MM:SS format calculated based upon the instantaneous sample rate
- Add File Header - Selects whether a header displaying the contents of each column should be appended to the beginning of the .csv file
- Use Scaled Data - Signals to the software to convert the 16-bit values read from the sensor into a sign-adjusted (two's complement) scaled number. For example, when this option is enabled, be in units of degrees/second
Software Revision History
IMU EVALUATION SOFTWARE GETTING STARTED
The EVAL-ADIS2 has been superseded by the EVAL-ADIS-FX3 and is no longer supported.
This guide assumes that you've connected your vibration sensor to the EVAL-ADIS2, drivers were successfully installed on your PC, and you've downloaded the correct software for your sensor. We recommend reviewing the Hardware User Guide before continuing.
Software Downloads
Click here to download the latest version of the IMU Evaluation software.
Click here to download the latest drivers for the EVAL-ADIS2.
This application requires Microsoft .NET 3.5 to be installed and enabled on the host PCs running Windows 10. Additional information on enabling .NET 3.5 can be found here.
EVAL-ADIS2 IMU Evaluation Software Overview
The IMU Evaluation Software is a Microsoft Windows (.NET) application that works in conjunction with the EVAL-ADIS2, in order to provide users with a PC-Based interface to most ADIS16xxx products. This platform enables observation of basic sensor functions, read/write access to all user-accessible registers, and full-rate data acquisition, which is synchronous with data production of each ADIS16xxx.
This guide builds upon the EVAL-ADIS2 Hardware User Guide and assumes that you've installed the necessary drivers and software.
Using the EVAL-ADIS2 IMU Evaluation Software
Main Window
Once the IMU Evaluation software loads, you should be presented with a window similar to the image shown below.
The image below has been color-coded to illustrate the different parts of the IMU Evaluation Software. These colored sections will be referred to in the following sections.
The drop-down menus highlighted in orange list additional features and utilities that make up the core functionality of the evaluation software.
- The Devices menu provides a list of supported products. Selecting a product from this list will configure the IMU evaluation software register map. Each device has a unique register map that must be selected to ensure proper sensor operation. The green box shows the active device. In this example, the ADIS16448 is selected.
- The Register Access option calls a sub-menu that lists all user-configurable registers available from the part number selected in the “Devices” drop-down menu. It also provides read/write access to each register.
- The Data Capture option calls a sub-menu designed to enable synchronous data logging from the selected device.
- The Demos option calls a 3-D visualization tool. This feature is only supported for the ADIS16480 and ADIS16448 devices.
- The Tools option calls a sub-menu that displays USB diagnostic information.
- The About option provides more detailed software revision information.
The purple box shows the primary, inertial output registers for the selected device. These values are updated in real-time after pressing the Read button (identified by a red box).
The yellow box shows three waveform recorder windows. Each window allows for plotting the three primary sensor types (gyroscopes, accelerometers, and magnetometers [if supported]). The top subplot displays gyroscope data, the middle plot displays accelerometer data and the bottom plot displays magnetometer data. Each plot color corresponds to the colors displayed in the “Output Registers” window (highlighted in purple).
Register Access
The Register Access window provides read and write access to all user-accessible registers listed in the selected device's datasheet. The image below shows a screenshot of the window.
The color-coded image below is referenced in the following section.
The purple box sorts each set of registers into a standard category. The available categories are:
- Control/Status - General sensor configuration, alarm, and metadata registers
- Output - Inertial sensor output registers
- Calibration - User offset and misc. calibration registers
The calibration register section mentioned above is separate from the factory calibration registers and procedures!
The section highlighted by the red box lists all of the registers in the selected category. Click on the register name to select a register for individual read/write access.
The green box identifies the read/write control options for the current register selection.
Registers must be written in hexadecimal format!
The Update Registers in Category button (shown in an orange box above) automatically reads all of the registers shown in the selected category (red box) and updates their contents in the GUI.
The section highlighted in yellow identifies provides a means of easily calling subroutines within the connected sensor. Clicking on a button is equivalent to writing a single-bit command to the respective register.
The Save Reg Settings to File programmatically reads and saves the contents of all of the registers in the current category into a *.csv (common-delimited) file. The Load Reg Settings from File button reads a target .csv file and attempts to write the saved values back into the sensor.
The Register Access form always writes to both the upper and lower bytes of a given register. When writing to a register, make sure to include the desired 16-bit value in hexadecimal format before clicking the Write Register button.
Data Capture
The Data Capture window only supports synchronous data acquisition and logging to a file on the host PC. Data samples are only read from the sensor when the data ready pin toggles, indicating that data is valid.
The color-coded image below is referenced in the following section.
The section highlighted in red lists all of the registers that are eligible for data capture. Checking the box next to each register indicates that the specified register values should be recorded once the data stream begins.
The section highlighted in green allows for customizing the file name and location of the resultant .csv files.
The section highlighted in yellow identifies the data stream configuration options.
- Record Length - The total number of samples to be captured. A sample is defined as a single “data valid” period as signaled by the data ready pin on the sensor
- Sample Rate - The instantaneous data ready rate as measured by the evaluation board
- Capture Time - The estimated data capture time in DD:HH:MM:SS format calculated based upon the instantaneous sample rate
- Add File Header - Selects whether a header displaying the contents of each column should be appended to the beginning of the .csv file
- Use Scaled Data - Signals to the software to convert the 16-bit values read from the sensor into a sign-adjusted (two's complement) scaled number. For example, when this option is enabled, be in units of degrees/second
Software Revision History
IMU EVALUATION SOFTWARE REVISION HISTORY
EXAMPLE EVALUATION EXERCISES
Gyroscope Demonstration
The following example provides a simple demonstration example, for illustrating the gyroscope response to simple rotation.
In order to re-create the z-axis gyroscope (blue waveform, top plot) response, click on Read button and rotate the ADIS16488/EVAL-ADIS, in the manner that the following picture illustrates. Perform a couple of rotation cycles and then hit Stop.

In order to re-create the x-axis gyroscope (read waveform, top plot) response, click on Read button and rotate the ADIS16488/EVAL-ADIS, in the manner that the following picture illustrates. Perform a couple of rotation cycles and then hit Stop. Note that using both both thumbs, to fix the pivot point, typically helps produce a response that is closer to “x-axis only.”

In order to re-create the y-axis gyroscope (green waveform, top plot) response, click on Read button and rotate the ADIS16488/EVAL-ADIS, in the manner that the following picture illustrates. Perform a couple of rotation cycles and then hit Stop. Note that using both both hands, to fix the pivot point, typically helps produce a response that is closer to “y-axis only.”

The purpose of these simple exercises is to develop an intuition the sensor's response to motion. For those who develop their own clever demonstration ideas, post them in the Engineer Zone-MEMS Community.
Accelerometer Demonstration, Gravity
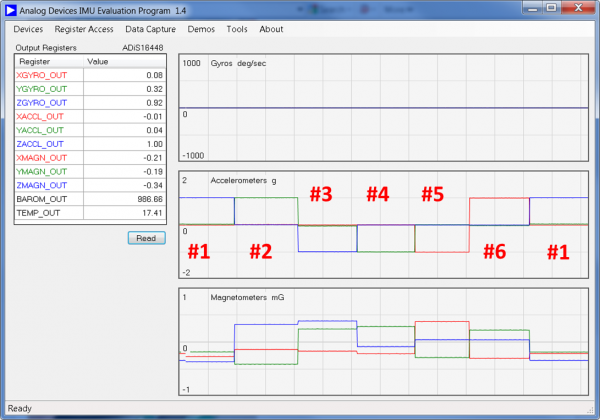
The ADIS16448 accelerometers response to gravity, in a manner that is consistent with Figure 17, on page 12 of the ADIS16448 datasheet. Use the Waveform Recorder to verify the accelerometer responses in six different orientations. In this exercise, place the ADIS16448/EVAL-ADIS flat on a table, or in a small vice, as shown in the following picture. Then, click on Read, wait for the curves to reach two divisions and then click on Stop. Repeat this process, using the following pictures, which represent a total of six orientations, including #1





Complete the exercise by returning to orientation #1 for the final two divisions on the waveform recorder screen and the final result will look like this.
Accelerometer Demonstration, Dynamic
Note that this exercise is just an example of how to develop an understanding of how the accelerometers will respond to dynamic motion. There are an infinite number of ways to do this. Keep in mind that the sample rate for the waveform recorder is fairly low, so keep your motion slow, so that you do not miss a leading edge of your motion and get fooled into thinking that the orientation is the opposite of what you expect. While this exercise uses the waveform recorder, the Data Capture function will provide higher sample rates and time resolution for transient movements.
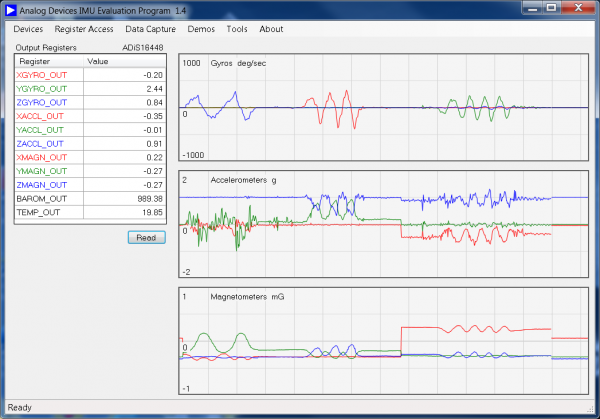
Click on Read and hold the ADIS16448/EVAL-ADIS flat in your hand, with the USB cable pointed to the right and the ADIS16448 pointed up. Swing the device in a clock wise direction, in a manner that is similar to a big wave to someone. At the end of the clockwise wave, you will want the ADIS16448/EVAL-ADIS to be pointed down. Then swing the ADIS16448/EVAL-ADIS back in a counter-clockwise direction and when the device is back in its original orietnation, click on Stop. The following picture provides an example of what the waveform recorder will look like during this exercise. Notice the positive z-axis response on the leading edge of the response (blue curve) of the clockwise rotation. On the backswing, the rotation is counter-clockwise and the z-axis response leads with a negative transient.

Gyroscope Bias Correction
The ADIS16448 datasheet (page 19, revision 0) offers a three-step process for gyroscope bias correction. This exercise implements these steps, using the ADIS16448/EVAL-ADIS.
STEP #1: Set SENS_AVG = 0x0104
From the Main Window, click on the Register Access option. Once this window is open, select the SENS_AVG regsiter and write “104” in the New Hex Value box, as shown in the following figure. Then click on Write Register. Notice that the register contents box changes at the conclusion of the write cycle.


APPLICATION TIP: When writing to the SENG_AVG register, using an embedded processor, write to the upper byte first, using DIN = 0xB801 (SENS_AVG[15:8] = 0x01) and the ADIS16448 will automatically update the lower byte to 0x04.
STEP #2: Set SMPL_PRD = 0x0401
Stay in the Register Access window and click on SMPL_PRD, type 1001 into the New Hex Value box and then click on Write Register. Notice that the register contents box changes at the conclusion of the write cycle.

STEP #3: Set GLOB_CMD = 0x0001 (Start Auto-null)
Click on the Write button, located next to the AutoNull, on the right side of the screen.

After the calibration function completes, all of the register values on the screen will automatically refresh. Click on the Calibration register category to observe the updated values in the xGYRO_OFF registers.
WAITING FOR SOFTWARE UPDATE TO PROVIDE THIS FIGURE
APPLICATION TIP: The GLOB_CMD register access is managed in a separate box, to help manage the processing time associated with each single-command. When starting an auto-null function with an embedded processor, set DIN = 0xBE01 (GLOB_CMD[7:0] = 0x01) and wait at least 75ms before writing another commmand to the SPI interface.
Gyroscope Sensitivity
For extensive characterization of sensitivity or linearity, over a broad range of conditions, a motor stage with encoder feedback offers the most efficient and accurate approach. For limited conditions, one can employ a simpler approach that involves reading the gyroscope output data while rotating it around a fixed angle. After finishing the motion and data collection, one can calculate the displacement angle by adding all of the gyroscope measurements together and then dividing that sum by the sample rate. Here is a summary of the approach used in this exercise:
1. Use an ADIS16448/EVAL-ADIS and the IMU Evaluation software.
2. Use the edge of a table as a reference, to rotate the ADIS16448/EVAL-ADIS 360 degrees around the z-axis, while capturing data. Since the ADIS16448/EVAL-ADIS will end up in the same place that it started, it is easy to assure an accurate 360 degree turn.
3. Use a range setting of +/-1000 deg/sec (SENS_AVG[15:8] = 0x04).
4. Use a sample rate of 51.2SPS (SMPL_PRD = 0x0401).
5. Capture 10 seconds worth of data.
Start by using the Register Access screen to write the appropriate values to SMPL_PRD (0x0401) and SENS_AVG (>0x0400). After updating these registers, close the Register Access screen and open the Data Capture screen. Select the ZGYRO_OUT box and duplicate all of the settings in the following picture. The filename and location can be different than shown on in this picture.
After the Data Capture settings match the settings in the above picture, position the ADIS16448/EVAL-ADIS so that one of the long PCB edges is in alignment with a table edge. Practice rotating it a full 360 degrees within 10 seconds. Try to avoid rapid changes in the rate of rotation. This may take a few trials to find the right motion and direction. Once comfortable with the approach, click on Capture and rotate the ADIS16448/EVAL-ADIS a full 360 degree and make sure it is in alignment with the same edge that it started on.
REFERENCES
For more information on this approach to measuring sensitivity, click on the following technical article link:
Gyroscope/Accelerometer Noise
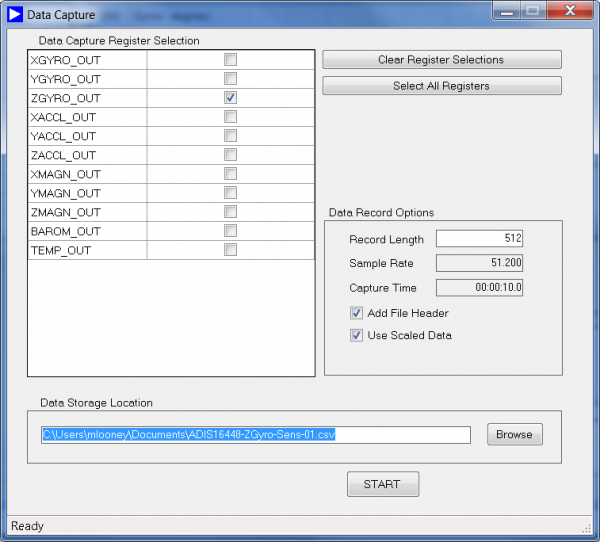
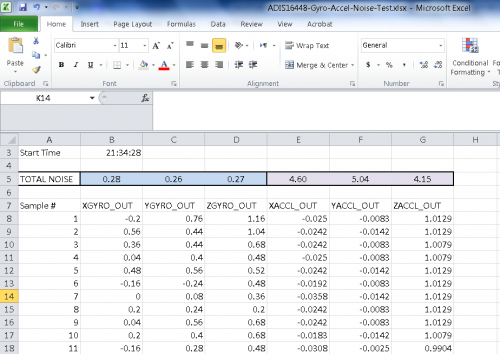
In order to test the full-bandwidth, total noise in the ADIS16448 gyroscopes and accelerometers, use the Register Access menu to set SMPL_PRD = 0x0001 and SENS_AVG = 0x0400. Then, go into the Data Capture menu and duplicate the settings in the following picture. Click on Start to collect the data and then open the data-log file in MS Excell to analyze the total noise for each axis, using the STDEV command inside of Excel. Make sure that the ADIS16448 is on a stable surface when performing this exercise.

Note that all six sensors display noise that is consistent with the total noise specificaitons in the ADIS16448 datasheet.
In-run Bias Stability
For the ADIS16448 gyroscopes and acceleroemeters, “In-run Bias Stability” refers to the best resolution available, when averaging sequetital, time domain data. This has a direct impact on the accuracy of a bias correction and therefore, has a direct impact on angle measurement drift. In reviewing the Allan Variance curve for the gyroscopes (Figure 7), the minima of the the best performance curve (mean - 1 sigma) is associated with an integration time of ~100 seconds. However, many of the units (from mean and mean + 1 sigma curves)) start approaching their minima at ~40 seconds. While selecting the best settings may require some iteration, this exercise starts with an integration of 40 seconds, an output data rate of 51.2 SPS (SMPL_PRD = 0x0401) and a dyanmic range of +/-250 degrees/second (SENS_AVG = 0x0104).
Here is a snapshot of the Data Access and Data Capture screens, which configures the software to take 50 sets of z-axis gyroscope data, that contain 40-second time records each, at a read rate of 51.2SPS.


Click on the following link, for an example data file, with a manual calculation of the Allan Variance, at 40 seconds of integration time. In this file, you will find the test unit exhibited ~13 deg/hour of in-run bias stability. In this file, use the following reference points:
Column A = Sample number
Column B = Gyroscope output data
Column C = 40-second average, starting at row 2053
Colum D = Square of the mean difference
Cell F2 completes the Allan Variance computation
Angle Random Walk
Additional details are coming soon.
resources/eval/user-guides/inertial-mems/imu/adis16448.txt · Last modified: 11 Feb 2021 18:03 by Ioana Chelaru